
Table of Contents
Arduino R3 Basic Servo With the PCA9685
In this project were going to see how to connect multiple servos to the PCA9685 breakout board
ref : https://www.youtube.com/watch?v=kUHmYKWwuWs
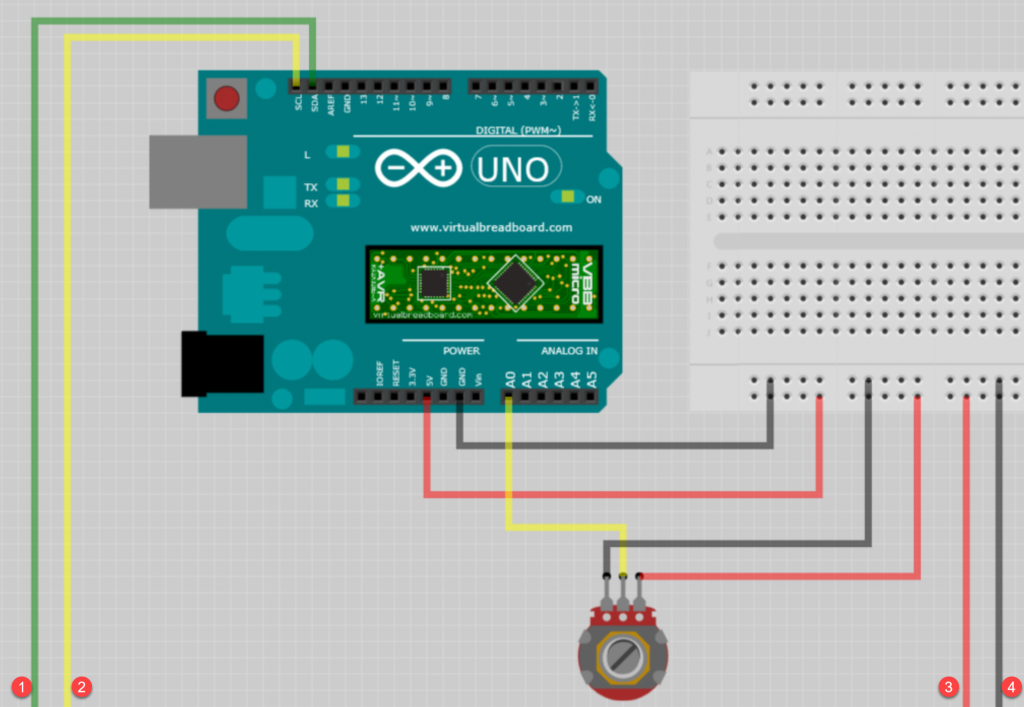
Wiring Diagram
- 1 x Arduino
- 1 x PCA9685 breakout board
- 1 x Servo
- 1 x Variable Resistor or Joystick ( Several Variable resistors)
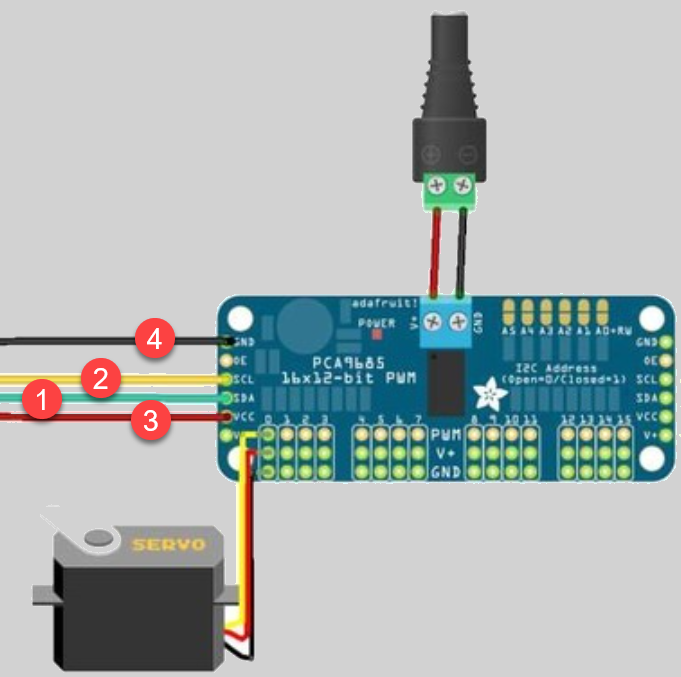
PCA9685
When plugging in the Servo motor connections, the number starts at 0 to 15 from left to right.

Arduino Sketch
The Adafruit PWM Servo Driver library has to be added to the Arduino IDE through the Sketch -> Include Library -> Manage Library’s top toolbar menu.
#include <Wire.h>
#include <Adafruit_PWMServoDriver.h>
#define MIN_PULSE_WIDTH 650
#define MAX_PULSE_WIDTH 2350
#define FREQUENCY 50
Adafruit_PWMServoDriver pwm = Adafruit_PWMServoDriver();
int controlA = A0;
int motorA = 0;
void setup() {
// put your setup code here, to run once:
pwm.begin();
pwm.setPWMFreq(FREQUENCY);
}
void moveMotor(int controlIn, int motorOut)
{
int pulse_wide, pulse_width, potVal;
potVal = analogRead(controlIn);
pulse_wide = map(potVal, 0,1023, MIN_PULSE_WIDTH, MAX_PULSE_WIDTH);
pulse_width = int(float(pulse_wide)/1000000 * FREQUENCY * 4096);
pwm.setPWM(motorOut , 0, pulse_width);
}
void loop() {
// put your main code here, to run repeatedly:
moveMotor(controlA, motorA);
}